Характеристики и описание
- Производитель
- Страна производительСША
Описание:
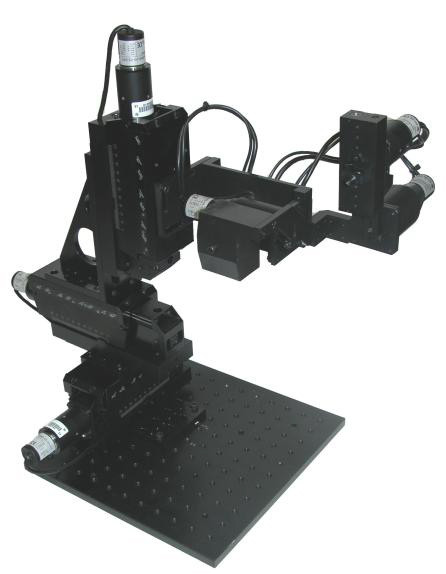
Компактная система NanoRobot-6AX предназначена для точного позиционирования. Она комбинирует уникальные возможности RoboMate с XYZ-позиционером NTS100. NanoRobot-6AX – это быстродействуюшая 6- осная полностью автоматическая система. Пользователь имеет возможность подводить рабочий инструмент к объекту под любым мыслимым углом с нанометровой точностью. Использование технологии Virtual Point позволяет изменять угол инструмента не смещая его кончик. Система управляется программно, но может управляться и джойстиком, приобретаемым дополнительно.
Конструкция.
В основе механизма особо точные пьезоэлектрические шаговые двигатели, контролирующие каждую из омей прибора. Линейное смещение по 3 осям осуществляется NTS100 в пределах 100 мм по каждой оси. Угловое смещение обеспечивает RoboMate, закрепленная на линейной XYZ системе.
Технология Virtual Point. Виртуальная точка формируется в месте пересечения осей первого и второго двигателя, а также оси инструмента. В такой конфигурации возможно изменение угла подхода к виртуальной точке без смешения кончика инструмента.
Работа с NanoRobot-6AX через программное обеспечение под Windows, но возможно и при помощи джойстика (для контроля всех 6 осей требуется 2 джойстика: один для XYZ и один для угловых смещений).
Пределы линейных смещений составляют 100 мм по каждой XYZ оси.
Пределы угловых смещений: 360 градусов на первом двигателе (R1) и –90 - +70 градусов на втором (R2).
Держатель инструмента линейно смещается на 50 мм по оси инструмента.
Сердцем системы управления является DSP процессор, управляющий двигателями. При отключении питания каждый двигатель жестко фиксируется в текущей позиции. Люфт и дрейф пренебрежимо мал. NanoRobot-6AX требуется питание 12 В, которое может быть от аккумуляторов (приобретается дополнительно).
Применение
- Микроскопия о разработка микросхем
- Микро и нано-позиционирование
- Тестирование микросхем (управление пробником)
- Укладка оптоволокна
- Ориентирование для рентгеновской съемки
- Ультра-точная сборка
- Электрофизиология
- Микроинъекция
- Микрохирургия
Технические характеристики
|
NTS100 XYZ позиционер |
|
|
Смещение |
100 мм x 100 мм x 100 мм |
|
Мин.инкремент (открытый цикл) |
около 1нм |
|
Мин.инкремент (замкнутый цикл) |
50 нм или 125 нм в зависимости от модели енкодера |
|
Точность на наибольшем смещении |
<0.01% |
|
Воспроизводимость (однонаправленная) |
< 1нм |
|
Воспроизводимость (двунаправленная) |
< 0.3 мкм |
|
Люфт (мертвый ход) |
< 0.3 мкм |
|
Гистерезис |
< 0.5 мкм |
|
Вращение (X) / 1 мм |
< 2.5 мкрад |
|
Наклон (Y) / 1 мм |
< 2.5 мкрад |
|
Максимальная скорость |
500 мкм/с |
|
Время отклика (зависит от скорости) |
< 0.3 мс |
|
Диапазон скоростей |
0.5 нм/с - 500 мкм/с |
|
Наибольшая вертикальная нагрузка |
3 кг |
|
Наибольшая горизонтальная нагрузка |
10 кг |
|
Наибольшее усилие вперед/назад |
30/30 Н |
|
Долговременная стабильность |
< 2 нм/час при 20oC |
|
RoboMate |
|
|
Угловые двигателей отклонения от вертикали |
360° (R1) и -90° - +70° (R2) |
|
Минимальный угловой шаг |
0.00055° |
|
Скорость углового вращения |
0.006°/с - 90°/с |
|
Диапазон линейного смещения |
50 мм |
|
Минимальный линейный шаг |
0.1 мкм |
|
Скорость линейного смещения |
1 мкм/с - 25 мм/с |
|
Шаг линейного смещения в шаговом режиме |
0.01 - 1.0 мм |
|
Максимальная негрузка |
0.5 кг |
|
Наибольшее поступательное/возвратное линейное усилие |
20 Н |
|
Угловой дрейф |
< 0.0003°/час |
|
Линейный дрейф |
< 2 нм/час |
|
Общие параметры NanoRobot-6AX |
|
|
Вес |
2.85 кг |
|
Размеры (мм) |
300 x 450 x 600 |
|
Питание |
12 В |
|
Мощность |
9 Вт |
Роботизированная система нанопозиционирования DTI NanoRobot-6AX
Под заказ
Цену уточняйте
Минск ∙
Доставка
Оплата и гарантии